ARTag
An ARTag is a type of AR (Augmented Reality) tag that can be used to mark object positions in a three-dimensional scene or to assist robots with localization and navigation. By placing QR code markers in the environment, robots can scan these markers to obtain information about their location and use this information to plan paths and execute tasks.
ar_track_alvar Package
- The functionality for AR tag recognition is implemented through the open-source
ar_track_alvarpackage. For more details, refer to the official documentation. This package enables the detection and localization of single or multiple ARTags. - Package Path
~/robot_ros_application/catkin_ws/src/ar_tag_detect/ar_track_alvar
Node Startup
The ar_track_alvar node requires numerous parameters such as the size of the ARTag, the topic of the camera image, the topic of the camera intrinsic parameters, and tracking error, so it is typically run using a launch file.
To start the recognition nodes for the chin camera and the head RGBD camera, use the following commands respectively:
Head Camera
source ~/robot_ros_application/catkin_ws/devel/setup.bash
roslaunch ar_track_alvar roban_head_camera.launchChin Camera
source ~/robot_ros_application/catkin_ws/devel/setup.bash
roslaunch ar_track_alvar roban_chin_camera.launch
Launch File Paths
Head Camera
- /home/lemon/robot_ros_application/catkin_ws/src/ar_tag_detect/ar_track_alvar/ar_track_alvar/launch/roban_head_camera.launch
Chin Camera
- /home/lemon/robot_ros_application/catkin_ws/src/ar_tag_detect/ar_track_alvar/ar_track_alvar/launch/roban_chin_camera.launch
Single Tag Detection Launch File Configuration
When only single tag detection is required, a common configuration file is as follows (using the chin camera's launch file as an example):
```xml
<launch>
<group ns="chin">
<arg name="marker_size" default="4.4" />
<arg name="max_new_marker_error" default="0.08" />
<arg name="max_track_error" default="0.2" />
<arg name="cam_image_topic" default="/chin_camera/image" />
<arg name="cam_info_topic" default="/chin_camera/camera_info" />
<arg name="output_frame" default="/chin_camera" />
<node name="ar_track_alvar" pkg="ar_track_alvar" type="individualMarkersNoKinect" respawn="false" output="screen">
<param name="marker_size" type="double" value="$(arg marker_size)" />
<param name="max_new_marker_error" type="double" value="$(arg max_new_marker_error)" />
<param name="max_track_error" type="double" value="$(arg max_track_error)" />
<param name="output_frame" type="string" value="$(arg output_frame)" />
<remap from="camera_image" to="$(arg cam_image_topic)" />
<remap from="camera_info" to="$(arg cam_info_topic)" />
<remap from="visualization_marker" to="visualization_marker_chin" />
<!-- Remap the original result output topic name visualization_marker to visualization_marker_chin. The result is published under the chin group as /chin/visualization_marker_chin -->
</node>
</group>
</launch>
```
- marker_size -- The width of the ARTag code (in centimeters)
- max_new_marker_error -- The error threshold for detecting new tags
- max_track_error -- The tracking error threshold
- camera_image -- The topic of the input image, which can be monochrome or color, but should be unrectified as rectification is performed within this package
- camera_info -- The name of the topic that provides camera calibration parameters to rectify the image
- output_frame -- The name of the tf coordinate system to which the AR tag coordinates will be relative
Multiple Tags Combined Detection
ar_track_alvarallows multiple ARTag codes to be affixed to the same object and treated as a single entity during recognition. To "bundle" multiple tags, abundle_filesparameter must be passed in the launch file. The value of this parameter should be an XML format file that defines the coordinates of the four corners of each tag in the bundle. An example is as follows:<?xml version="1.0" encoding="utf-8"?>
<multimarker markers="11">
<marker status="1" index="10">
<corner z="0" x="-62.5" y="-32.5"></corner>
<corner z="0" x="-57.5" y="-32.5"></corner>
<corner z="0" x="-57.5" y="-27.5"></corner>
<corner z="0" x="-62.5" y="-27.5"></corner>
</marker>
<marker status="1" index="1">
<corner z="0" x="27.5" y="-2.5"></corner>
<corner z="0" x="32.5" y="-2.5"></corner>
<corner z="0" x="32.5" y="2.5"></corner>
<corner z="0" x="27.5" y="2.5"></corner>
</marker>
.
.
.
<marker status="1" index="8">
<corner z="0" x="-2.5" y="27.5"></corner>
<corner z="0" x="2.5" y="27.5"></corner>
<corner z="0" x="2.5" y="32.5"></corner>
<corner z="0" x="-2.5" y="32.5"></corner>
</marker>
</multimarker>- In this example, the
<multimarker markers="11">tag defines that the bundle contains a total of 11 ARTag codes. - Under the
multimarkertag, themarkertag lists the x, y, z coordinates of the four corner points of each ARTag code, with theindexattribute filled with the id value of the individual ARTag code.
- In this example, the
After creating the
bundle_files, add abundle_filesparameter in the single tag detection launch file, specifying the path to the definedbundle_filesfile. Running this will enable joint localization of multiple tags.An example of multi-tag detection using the chin camera is located at:
- Launch File Path:
/home/lemon/robot_ros_application/catkin_ws/src/ar_tag_detect/ar_track_alvar/ar_track_alvar/launch/roban_chin_camera_multi.launch - Bundle Files Path:
/home/lemon/robot_ros_application/catkin_ws/src/ar_tag_detect/ar_track_alvar/ar_track_alvar/launch/MultiMarkerMap.xml - The positions of the tags in the
bundle_filesfile are shown in the figure below::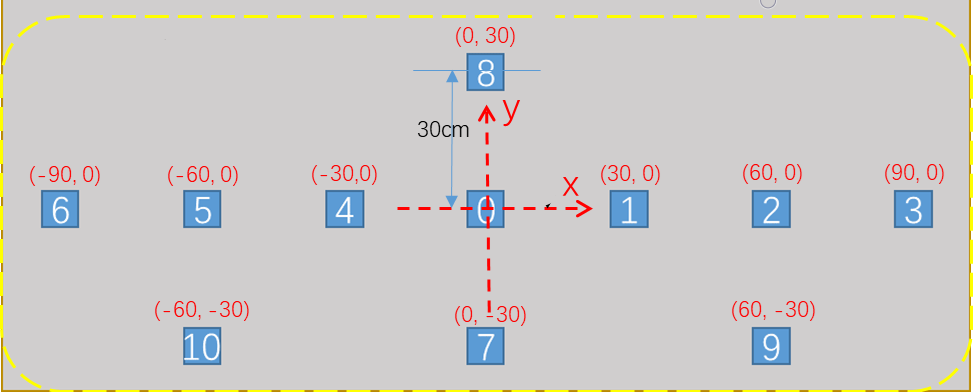
- To execute multi-tag recognition, run the following commands:
source ~/robot_ros_application/catkin_ws/devel/setup.bash
roslaunch ar_track_alvar roban_chin_camera_multi.launch
- Launch File Path:
Calibrating ARTag Size
The size of the ARTag should be the actual side length of the printed ARTag (square).
Tips:You can edit the width and height of the image in Word and then print it at "Actual Size" or "100% Size" to obtain a code of the specified size.
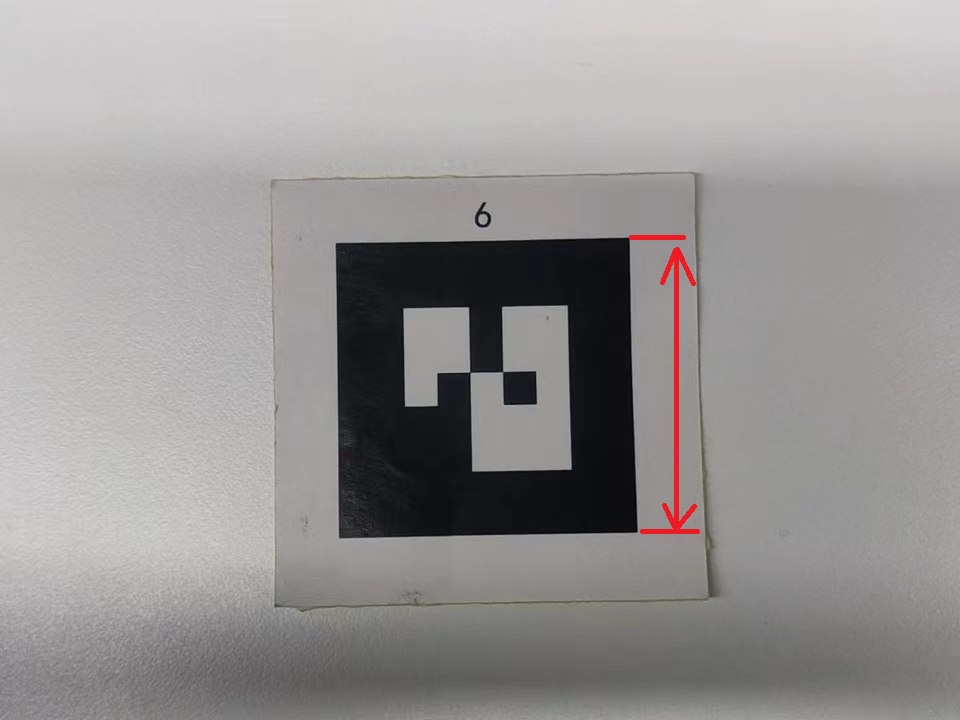
Modify the
marker_sizeparameter in the corresponding launch file configuration to the actual size of the printed ARTag.
Node Information
Node Names
Head Camera
- /head/ar_track_alvar
Chin Camera
- /chin/ar_track_alvar
Package Path
- ~/robot_ros_application/catkin_ws/src/ar_tag_detect/ar_track_alvar
Message Names
Head Camera
- /head/visualization_marker_head
Chin Camera
- /chin/visualization_marker_chin (Results for both single and multi-tag detection are published on the same topic)
Message Type
- visualization_msgs/Marker
Message Type Definition
uint8 ARROW=0
uint8 CUBE=1
uint8 SPHERE=2
uint8 CYLINDER=3
uint8 LINE_STRIP=4
uint8 LINE_LIST=5
uint8 CUBE_LIST=6
uint8 SPHERE_LIST=7
uint8 POINTS=8
uint8 TEXT_VIEW_FACING=9
uint8 MESH_RESOURCE=10
uint8 TRIANGLE_LIST=11
uint8 ADD=0
uint8 MODIFY=0
uint8 DELETE=2
uint8 DELETEALL=3
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string ns
int32 id
int32 type
int32 action
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
geometry_msgs/Vector3 scale
float64 x
float64 y
float64 z
std_msgs/ColorRGBA color
float32 r
float32 g
float32 b
float32 a
duration lifetime
bool frame_locked
geometry_msgs/Point[] points
float64 x
float64 y
float64 z
std_msgs/ColorRGBA[] colors
float32 r
float32 g
float32 b
float32 a
string text
string mesh_resource
bool mesh_use_embedded_materials
Result Output and Parsing
After running the launch file for chin camera detection, we can use the command
rostopic echo /chin/visualization_marker_chinin the terminal to view the ARTag recognition results in real-time. Here is an example of a data entry for parsing:header:
seq: 809
stamp:
secs: 1671697367
nsecs: 476323108
frame_id: "chin_camera" # Coordinate system of the output result
ns: "basic_shapes" # Result type: basic_shapes for single ARTag result, main_shapes for multiple ARTag code joint detection result
id: 6 # ARTag code number
type: 1
action: 0
pose:
position:
x: -0.00860899694651 # QR code perpendicular to the camera, positive direction to the right
y: -0.0696511716506 # QR code perpendicular to the camera, positive direction upwards
z: 0.271939015273 # QR code perpendicular to the camera, positive direction forward
orientation: # Quaternion
x: 0.986290075697
y: 0.026093318553
z: -0.0374334556082
w: 0.158586763981
scale:
x: 0.044
y: 0.044
z: 0.0088
color:
r: 0.5
g: 0.0
b: 0.5
a: 1.0
lifetime:
secs: 1
nsecs: 0
frame_locked: False
points: []
colors: []
text: ''
mesh_resource: ''
mesh_use_embedded_materials: FalseWhen performing multi-tag detection, the results of single tag detection are also output simultaneously. It is necessary to distinguish and process based on the
nsattribute of the obtained message.
Subscribing to Messages (Python Implementation)
```python
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from visualization_msgs.msg import Marker
import math
import numpy as np
import scipy.linalg as linalg
ARTAG_CHIN_TOPIC = "/chin/visualization_marker_chin" # Subscribe to the chin camera
class ArtagData():
def __init__(self):
self.topic_name = ARTAG_CHIN_TOPIC
rospy.Subscriber("/chin/visualization_marker_chin", Marker, self.chin_marker_callback)
def quart_to_rpy(self, w, x, y, z): # Convert quaternion to Euler angles
r = math.atan2(2*(w*x+y*z), 1-2*(x*x+y*y))
p = math.asin(2*(w*y-z*x))
y = math.atan2(2*(w*z+x*y), 1-2*(z*z+y*y))
return [r, p, y]
def rotate_mat(self, axis, radian): # Correct image rotation for more accurate x, y, z values
rot_matrix = linalg.expm(np.cross(np.eye(3), axis / linalg.norm(axis) * radian))
return rot_matrix
def chin_marker_callback(self,msg):
rpy = self.quart_to_rpy(msg.pose.orientation.w, msg.pose.orientation.x, msg.pose.orientation.y, msg.pose.orientation.z)
cam_rot = self.rotate_mat([0, 1, 0], 10 * math.pi / 180.0) # Rotate around the robot's y-axis
pos_in_torso = np.dot(cam_rot, np.array([[-msg.pose.position.y], [-msg.pose.position.x], [msg.pose.position.z]])).tolist()
rospy.loginfo("\nresult type: {}\ny: {} x: {} z: {}\nroll: {} pitch: {} yaw: {}\n======".format(msg.ns if msg.ns == "basic_shapes" else "\033[92m"+msg.ns + "\033[00m" , pos_in_torso[0][0], pos_in_torso[1][0], pos_in_torso[2][0], rpy[0], rpy[1], rpy[2]))
if __name__ == "__main__":
rospy.init_node("artag_data")
ad = ArtagData()
rospy.spin()
```
After running the launch file for chin camera detection and then running the above example program, place the ARTag code in front of the robot's chin camera. You will see the terminal print the current position and orientation angles of the ARTag code relative to the camera.

Using tf2 for Coordinate System Transformation
By default, the pose information returned through "/chin/visualization_marker_chin" or "/head/visualization_marker_head" is in the camera coordinate system, meaning the obtained position is the tag's position relative to the robot. If you need to obtain the robot's position relative to the tag, you can use
tf2_rosto transform from the robot coordinate system to the tag coordinate system.In fact, the
ar_track_alvarpackage has already built the tf tree branch between the camera and the tag for us.- You can run the command
rosrun tf tf_monitorto print out all current tf tree nodes and their relationships.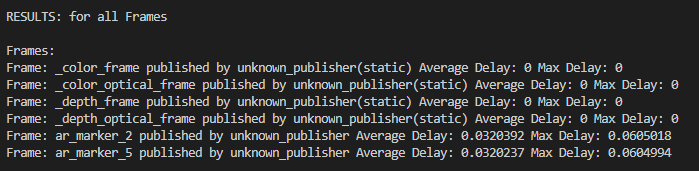
- You can also use the rviz visualization tool or the
rosrun tf view_framescommand to generate a tf tree connection diagram.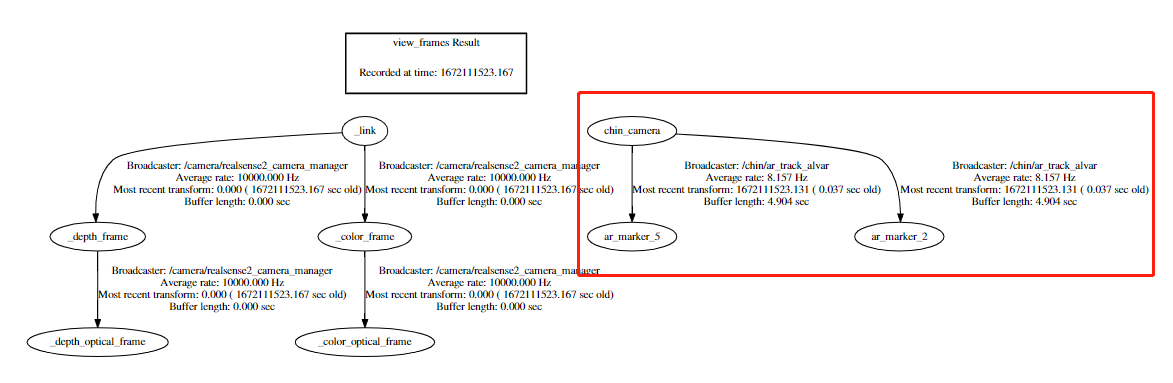 The right side of the above figure shows the transformation relationship between the current chin_camera and the coordinates of the two ARTag codes (ar_marker_n).
The right side of the above figure shows the transformation relationship between the current chin_camera and the coordinates of the two ARTag codes (ar_marker_n).When using multi-tag detection, the name of the tf coordinate system for the tag set is the name of the first ARTag code defined in the bundle_files (ar_marker_n).
- You can run the command
To obtain the robot's position in the tag coordinate system, here is an example:
#! /usr/bin/env python
# coding=UTF-8
import rospy
import tf2_ros
import tf
from tf2_geometry_msgs import tf2_geometry_msgs
if __name__ == '__main__':
rospy.init_node('tf_listener')
buffer = tf2_ros.Buffer() # Create a buffer object
sub = tf2_ros.TransformListener(buffer) # Create a subscriber object, passing in the buffer
rate = rospy.Rate(10.0)
while not rospy.is_shutdown():
try:
now = rospy.Time.now()
ps_out = buffer.lookup_transform("ar_marker_2", "chin_camera",rospy.Time())#Get the tf transformation relationship
print("{}\n{}".format("==="*10,ps_out))
except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException)as e:
continue
rate.sleep()The
lookup_transformfunction can conveniently obtain the transformation relationship between various coordinates, such as obtaining the position of chin_camera relative to ar_marker_2 in the example.