自检程序
运行自检程序
在终端命令行输入如下指令:
$ check运行后的界面如下(以 linux 系统为例):
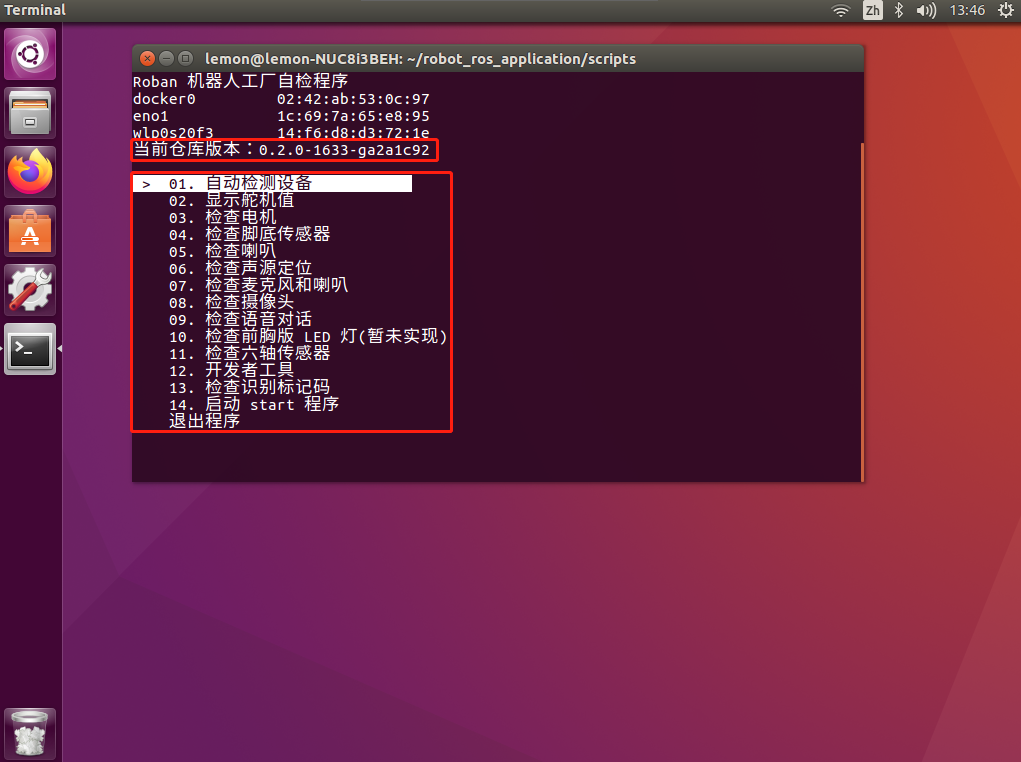
会显示当前程序包的版本以及自检项目,键盘
↑和↓键可以移动到对应项,Enter选择当前项
常用的检查项
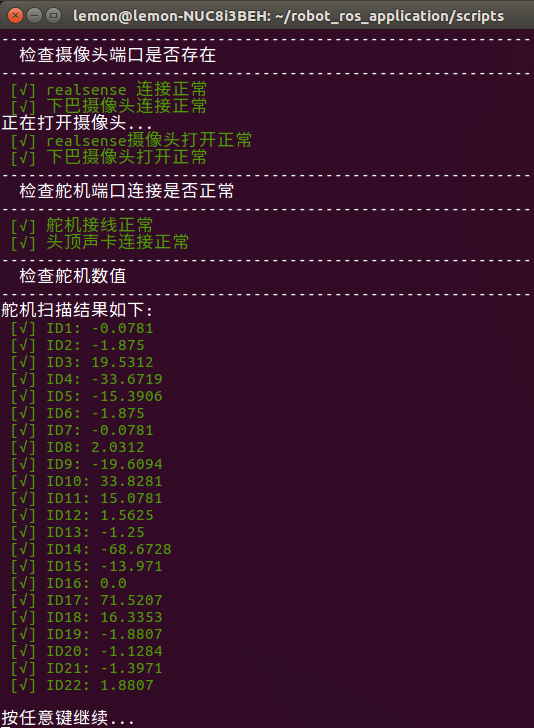
01. 自动检测设备涵盖了摄像头、舵机和声卡项目的检查
03. 检查电机列出了所有能搜索到的舵机的上锁情况,光标栏移动到对应的舵机编号敲击
Enter可以实现锁定/解锁的切换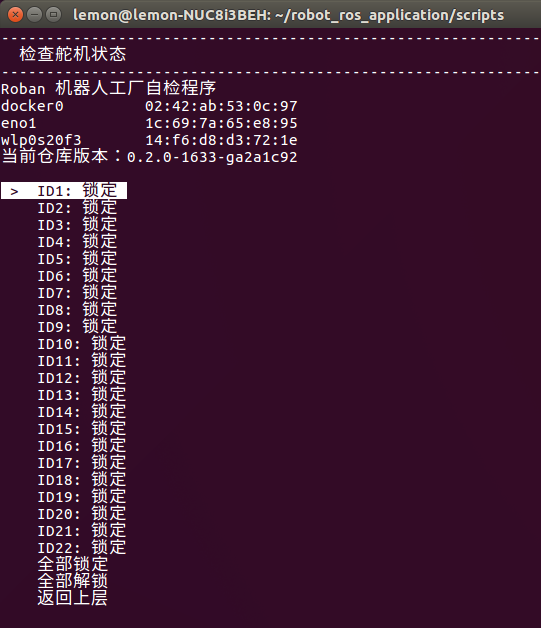
04. 检查脚底传感器悬空
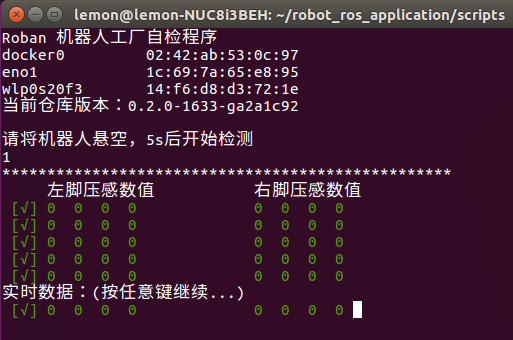
触地
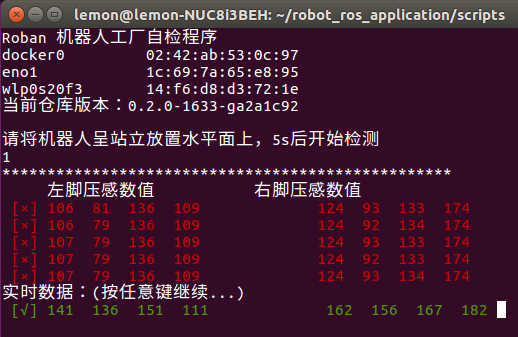
如果悬空状态下检测到较大压力数值或在触地状态下检测到较小压力数值,则脚底压力传感器有问题
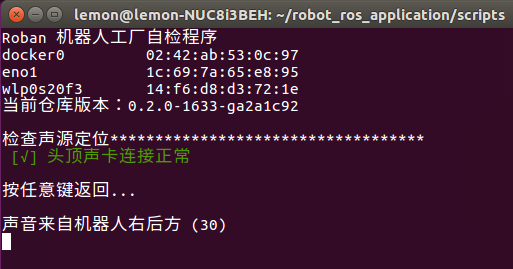
06. 检查声源定位检测 6 mic 阵列是否正常
需要在机器人的一个方向用唤醒词
鲁班鲁班触发机器人前进方向的声音方向是 300° ,顺时针增大,范围为 [0, 360)
07. 检查麦克风和喇叭用于检查麦克风的录音效果
根据提示
按任意键开始录音
录音完毕后,按任意键取消录音
按任意键播放录音
播放途中,可以按任意键关闭播放
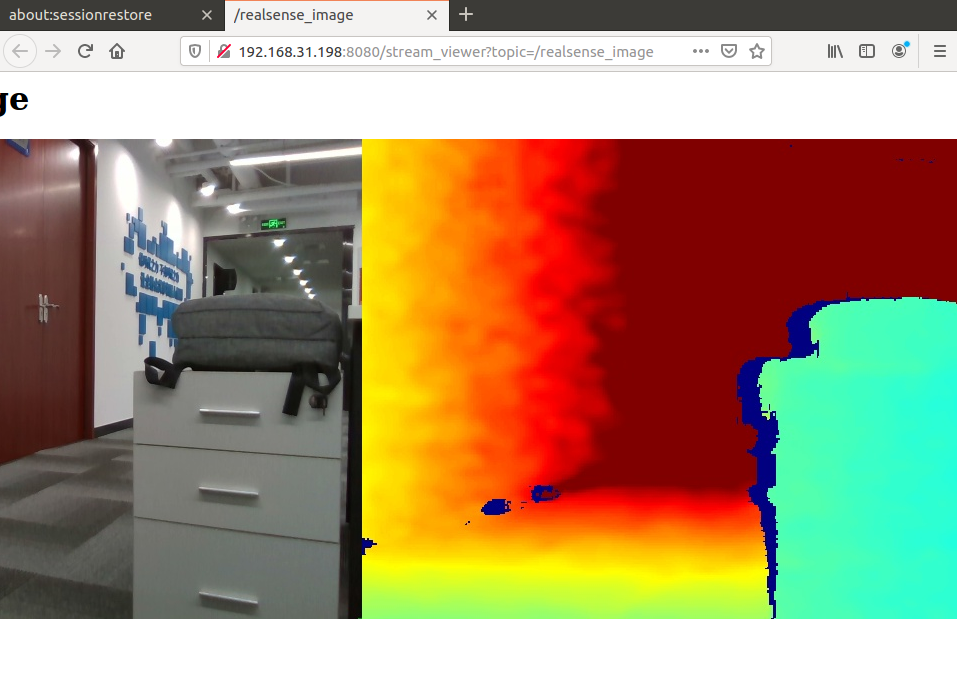
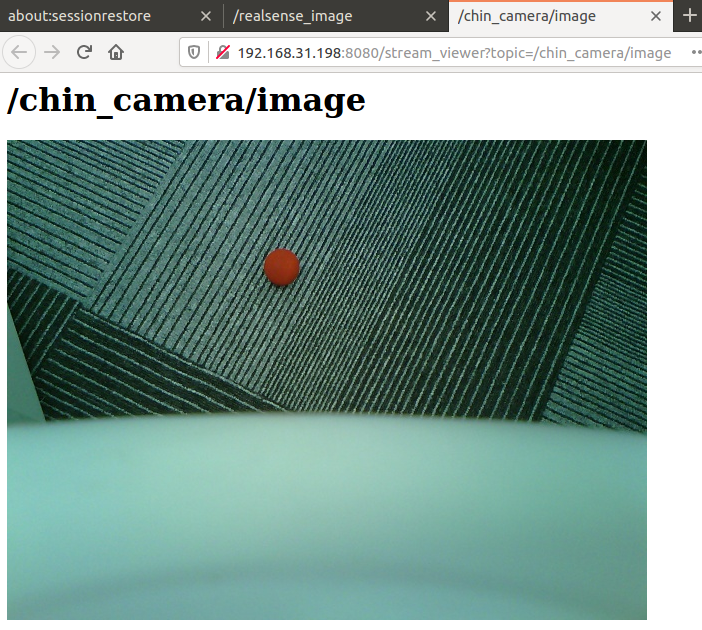
08. 检查摄像头用于排查摄像头是否接触不良或是软件读取摄像头的问题
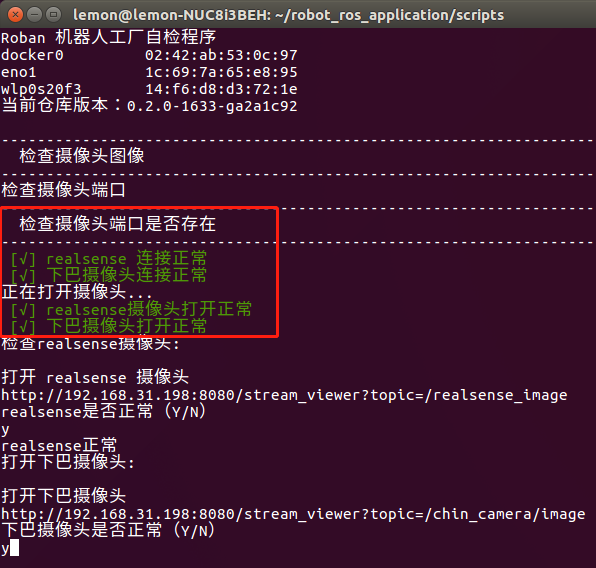
深度摄像头图像
下巴摄像头图像
09. 检查语音对话检查语音节点 AIUI 服务是否正常运行
待语音节点启动完毕,用唤醒词
鲁班鲁班触发并等待回复后,说今天天气怎么样AIUI 服务端会下发语义识别结果及回复的音频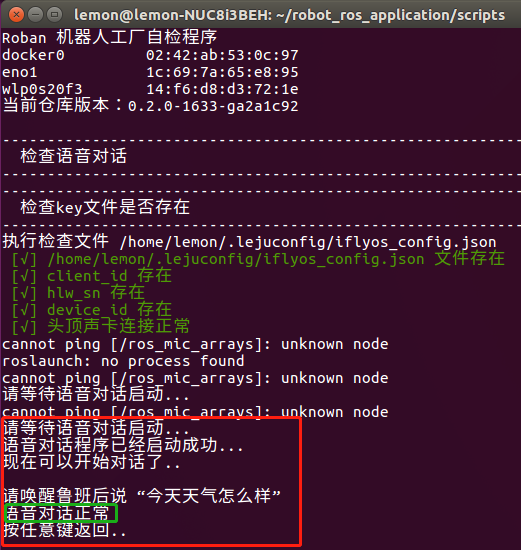
14. 启动 start 程序由于 check 中的舵机通信、摄像头等在多个程序使用情况下可能存在设备占用的问题,所以在 check 启动时会把 start.sh 启动的所有节点关闭
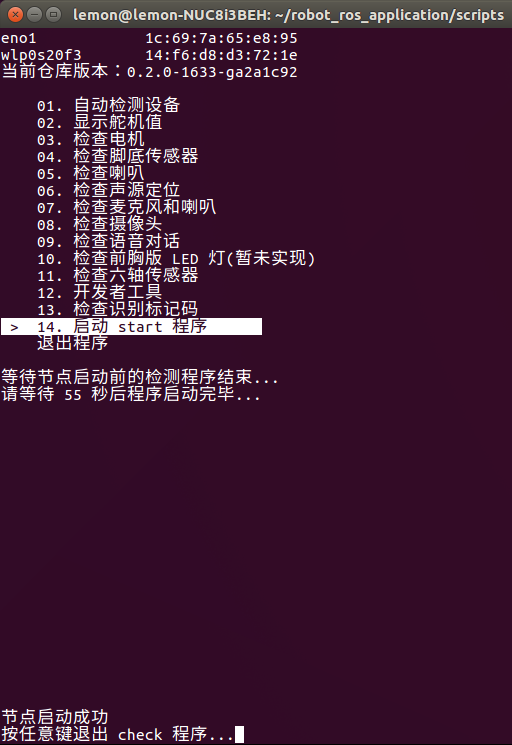
该选项用于在后台启动 start.sh
- 也可以通过 这个文档 里提到的方法启动
常见使用问题排查
在机器人步行过程中突然卡住
- 检查 start.sh 的终端是否打印
waiting...,如果有则是脚底压感数值过小导致。需要通过04. 检查脚底传感器检查脚底压感是否正常
- 检查 start.sh 的终端是否打印
SLAM 或其它读取摄像头的 topic 无数据
- 通过
08. 检查摄像头检查摄像头是否正常
- 通过