Self-Check Program
Running the Self-Check Program
Enter the following command in the terminal command line:
$ checkThe interface after running the program is shown below (for a Linux system as an example):
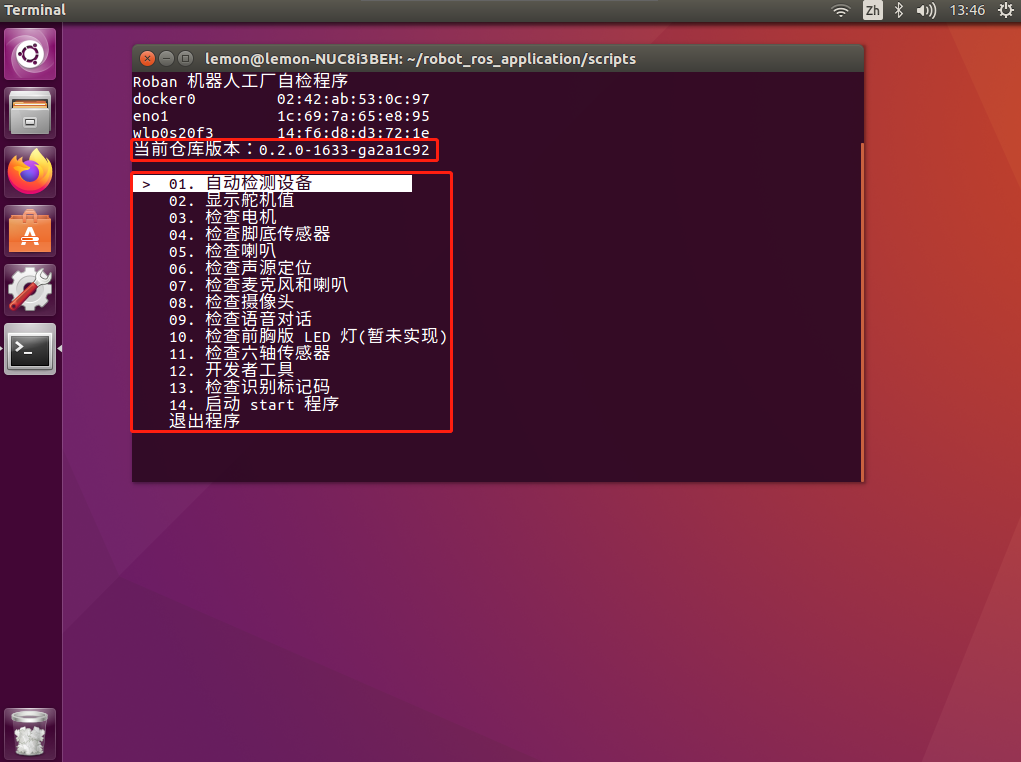
The current version of the program package and the self-check items will be displayed. You can use the
↑and↓keys on the keyboard to move to the corresponding item, and pressEnterto select it.
Common check items
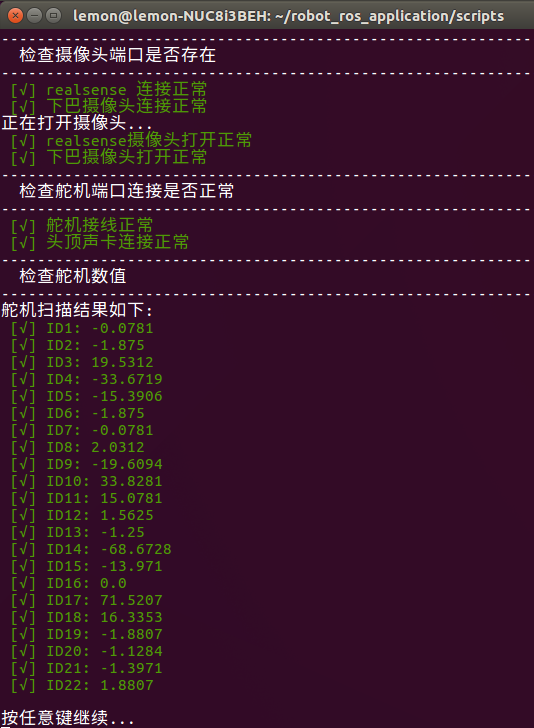
01. Automatic Device DetectionThis includes checks for the camera, servo, and sound card.
03. Check MotorsIt lists the lock status of all servos that can be detected. Move the cursor bar to the corresponding servo number and press
Enter to switch betweenlock/unlock.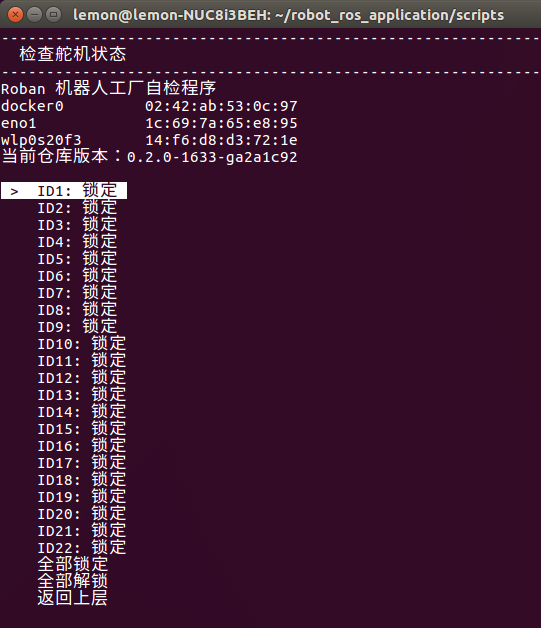
04. Check Foot SensorsIn the air
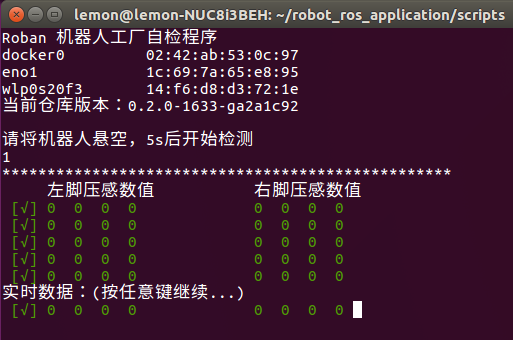
On the ground
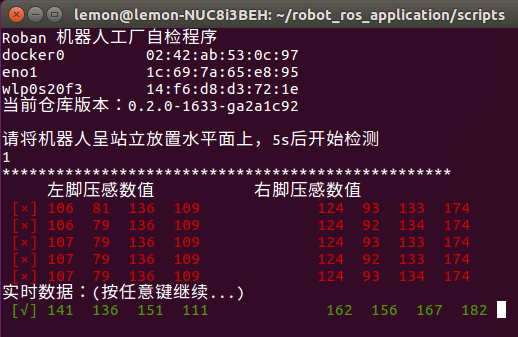
If a high pressure value is detected in the air or a low pressure value is detected on the ground, there is an issue with the foot pressure sensor.
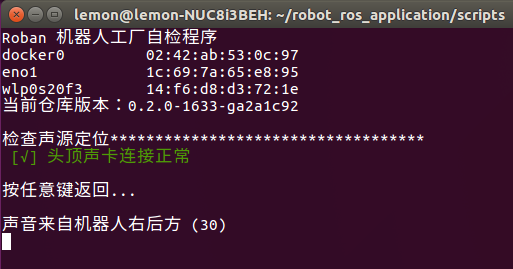
06. Check Sound Source LocalizationIt checks whether the 6-mic array is functioning properly.
You need to trigger it using the wake-up word
Lu Ban Lu Banfrom one direction of the robot.The sound direction in the robot's forward direction is 300°, increasing clockwise, with a range of [0, 360).
07. Check Microphone and SpeakerThis is used to check the recording quality of the microphone.
Follow the prompts
Press any key to start recording.
After recording is finished, press any key to cancel the recording.
Press any key to play the recording.
During playback, you can press any key to stop the playback.
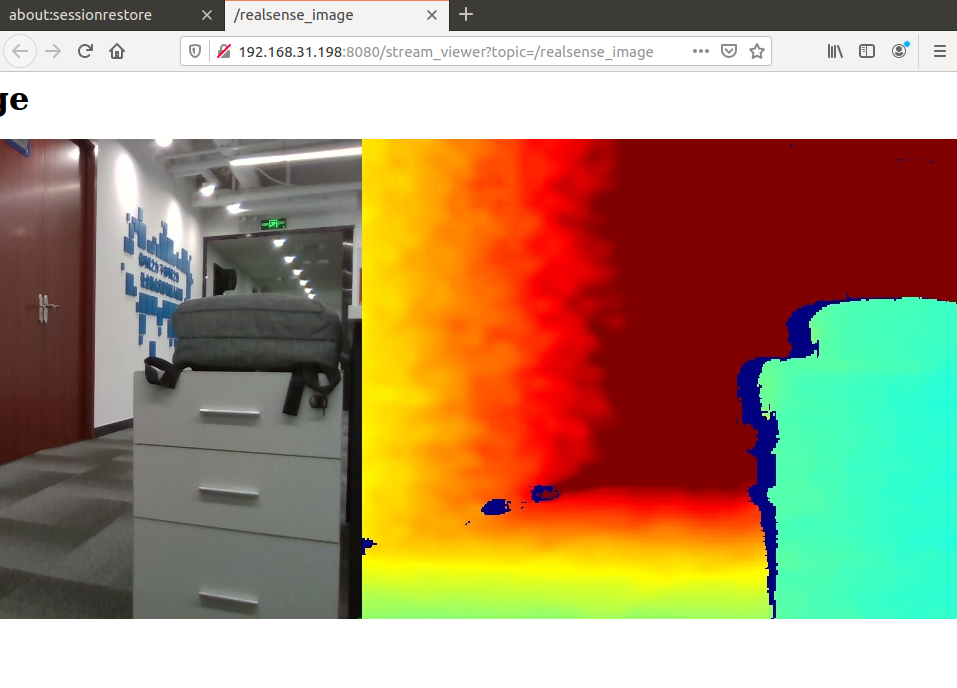
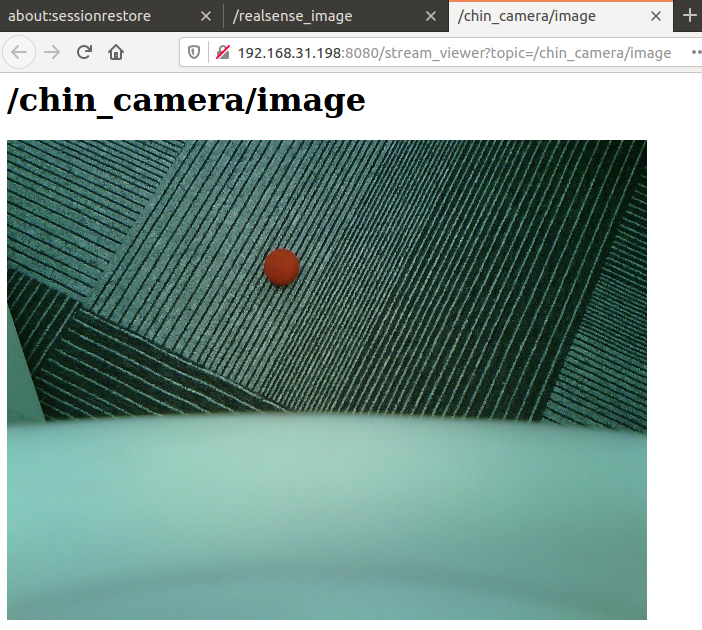
08. Check CameraThis is used to troubleshoot issues related to poor contact or software reading problems with the camera.
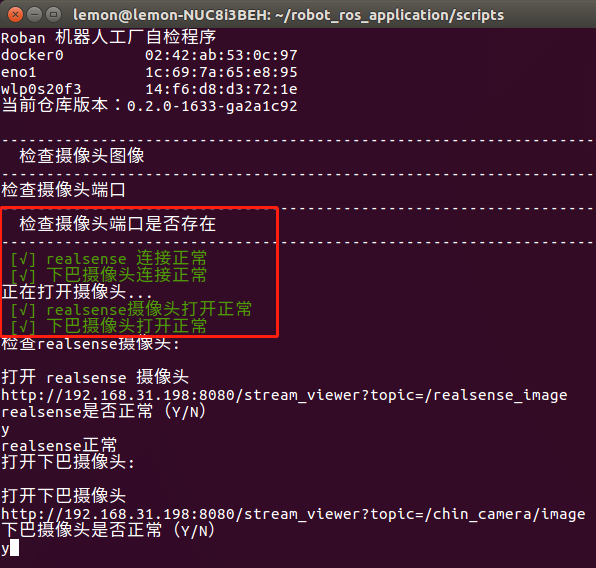
Depth camera image
Chin camera image
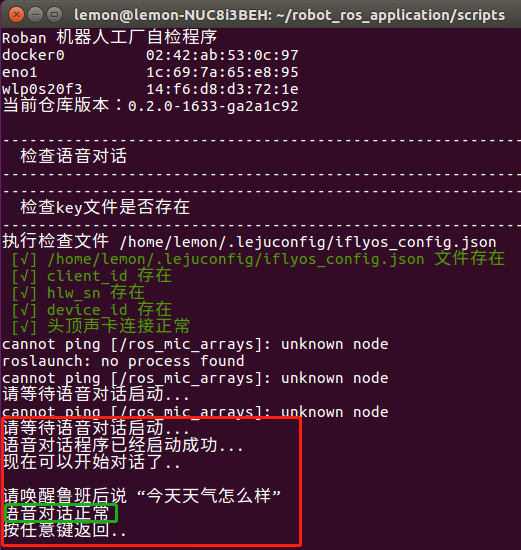
09. Check Voice DialogueIt checks whether the AIUI service of the voice node is running normally.
After the voice node is started, trigger it with the wake-up word Lu Ban Lu Ban and wait for a response. Then say How's the weather today?, and the AIUI service will send the semantic recognition result and the reply audio.
14. Start the start ProgramSince the servo communication and cameras in the check may encounter device occupation issues when used by multiple programs, all nodes started by start.sh will be closed when check is launched.
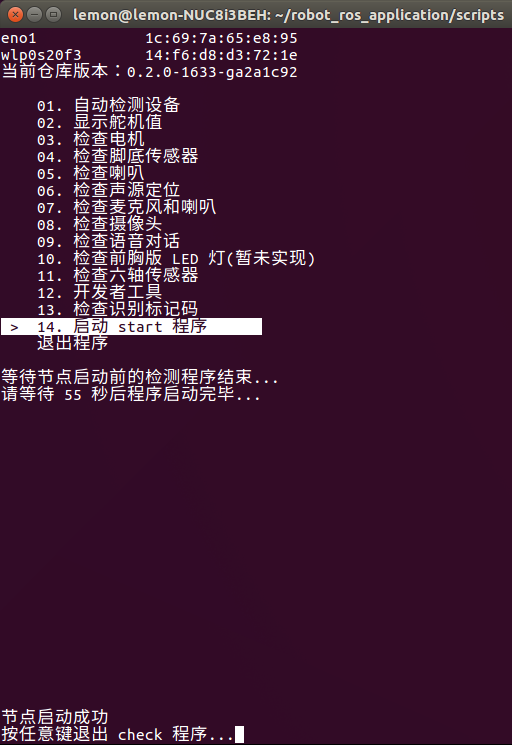
This option is used to start start.sh in the background.
- You can also start it using the method mentioned in this document
Common Usage Issues and Troubleshooting
The robot suddenly freezes during walking
- Check if the terminal running start.sh prints
waiting....If so, it indicates that the foot pressure value is too low. You need to use04. Check Foot Sensorsto check whether the foot pressure is normal.
- Check if the terminal running start.sh prints
No data in the SLAM or other topics that read the camera
- Use
08. Check Camerato check if the camera is functioning properly.
- Use